
|
醫海探弋,經顱磁刺激(TMS)定位技術的發展分析
專欄:酷品資訊
發布日期:2020-07-07
閱讀量:25114
作者:
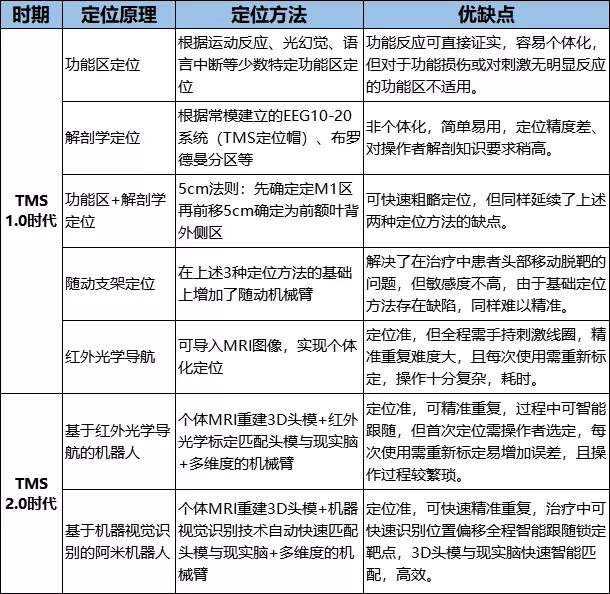
隨著經顱磁刺激技術(TMS)的快速發展,TMS治療指南[1][2]、TMS安全指南[3]、TMS專家共識[4][5][6]等權威文件的發布,TMS的應用越來越規范化和標準化,但在臨床和科研應用過程中,大家會發現,個體化、精準化、智能化也是TMS技術的發展趨勢。 首先,人的大腦形態各異,受損的大腦更是千奇百怪,如何實現個體化的解剖定位一直是臨床和科研的關注點;其次,在實施TMS過程中,一直困惱我們的問題有:TMS線圈首次難以精準定位、治療過程中由于患者頭部移動刺激容易脫靶,二次治療難以重復第一次的刺激部位,這不但會對治療效果產生直接影響,更關系到科研數據的客觀性和可信度。 所以,今天就與大家分析一下TMS定位技術的發展,期待能為大家選擇TMS定位方法提供一點參考。 為了方便理解,先上總圖:
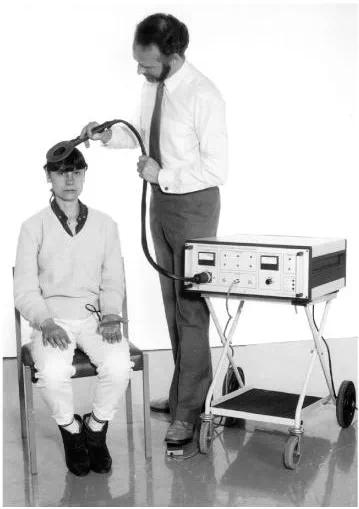
認識TMS1.0時代! “TMS1.0時代”,顧名思義,屬于TMS定位技術發展的初始階段,在此時期,TMS定位方法處于一種粗放定位、人工操作狀態。 > 腦功能區定位 業內人都知道,TMS技術的誕生標志是:1985年英國Barker教授在國際知名雜志《柳葉刀》上發表的一篇用TMS設備刺激原始運動皮層(M1區)引出運動誘發電位(MEP)的文章[7]。
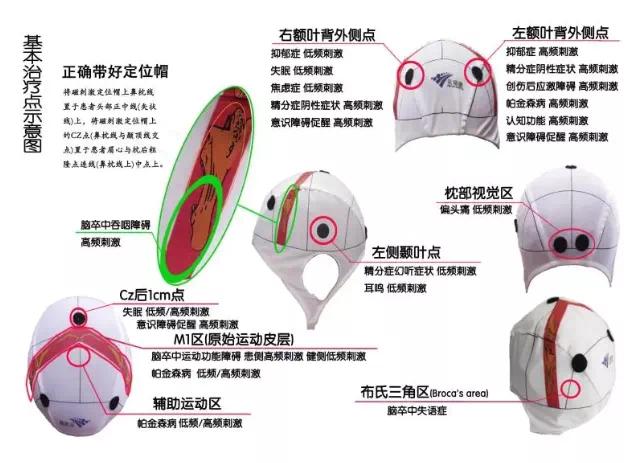
圖1.1 Barker教授演示TMS設備 從流傳的圖片可以看到,Barker教授手持刺激線圈,在沒有定位輔助工具的情況下進行了TMS治療演示,猜測采用的可能為腦功能區定位法。 功能區定位是對功能明確、易于檢測到靶區刺激效果的刺激部位進行定位,刺激M1區,在上下肢、面部很容易看到靶肌的抽動或者在靶肌上記錄到MEP,還有在視覺區刺激出現光幻覺,刺激Broca區出現語言停頓等。 這種方法容易實現個體化,但對刺激反應不明顯的腦區,如情緒、記憶的額葉刺激就不適用,因為情緒無法通過單次刺激來做出明顯改變。 > 解剖學定位 大腦的結構是所有一切腦科學的基礎,歷年來研究的人也很多。TMS利用解剖學定位是根據大腦的常模確定大概的解剖結構及位置,常見的方法有國際腦電10-20系統定位和布羅德曼分區,這依賴操作者對大腦解剖知識的熟練掌握,是一種非個體化的定位方法。 而目前臨床上TMS定位應用最多的是腦電10-20系統定位,這是借鑒腦電圖的定位方法,該法簡單易學易用[8],尤其是基于這種定位方法各TMS設備生產商都研制出了TMS定位帽,深受臨床初學者的喜愛。 測量閾值主要是在紅色區域(M1區)主管手部活動的運動皮質區域C3進行,其他相關疾病的治療位點如圖所示。
圖1.2 依瑞德2012年根據腦電10-20系統研發的TMS定位帽 > 腦功能區+解剖學定位 前額葉背外側區(DLPFC)是精神科治療許多疾病的常選刺激部位,臨床上常用手指(拇短展肌)M1區向前移動5cm來定位DLPFC,也可以用腦電10-20系統里的F3和F4分別定位左/右DLPFC。但每個人頭顱大小不同,也沒有考慮每個人解剖和功能變異的因素,不算個體化的刺激定位。 > 紅外光學導航定位 無論是基于腦功能區定位確定一個部位,然后在此基礎上尋找其他刺激部位,還是通過解剖學知識直接定位,實際上誰都無法保證刺激位置是準確的,因為整個刺激過程是一種“盲態”,無法看到到底刺激的是哪一處大腦皮層。 為了解決“盲態”問題,很早期就誕生了一種“可視化”的大腦皮層定位裝置,這種裝置初期是用于外科手術,后來引入TMS領域,該裝置可以導入個體的MRI數據,重建3D頭模,再采用紅外光學攝像頭和導光裝置,通過人工操作將現實腦和3D頭模進行匹配,將現實腦的空間位置轉換到“可視化”的3D頭模軟件上,這樣就實現了TMS首次精準定位的需求,并且對刺激線圈與頭皮的距離和角度有了嚴格控制,定位準確性得以大幅提升[8],類似紅外光學導航的還有一種磁導航產品(這里不詳述,感興趣可以網上查詢)。 但這種方法全程需要手持刺激線圈,而且每次使用都需重新標定,過程繁瑣耗時。如果想實現精準治療,需要在20分鐘(每個TMS治療方案不一樣,可能時長也不一,暫且以平均的20分鐘舉例)的刺激時間里手持刺激線圈一動不動的站在受試者旁邊,就問操作者你累不累?崩潰不崩潰?如果受試者頭部移動,我想操作者更奔潰,因為需要中斷治療,重新手動調整定位。 基于上述情況,這種定位方法是不適用于臨床治療的,所以僅在科研文章里見到過,應該說這種方法無法解決治療過程中頭部移動脫靶這個難題。 > 隨動支架 辦法總比困難多,為了解決過程中不脫靶的難題,依瑞德公司早在2015年就在已有純機械式線圈支架(用于在重復刺激時固定刺激線圈的裝置)的基礎上研發出了一款隨動支架。
圖1.3 2015年依瑞德研發的隨動支架 隨動支架的特點如下: ①三軸一體化的機械臂,可實現180°全方位定位; ②感應支架可隨頭部移動,始終刺激到相應靶點; ③可調節式座椅,提高患者舒適度。 隨動支架在某種意義上解決了患者在治療過程中頭部移動及舒適性問題,貌似可以解決紅外光學導航治療過程中不能跟隨的問題。 但是,經過臨床應用發現,如果頭部稍微偏移或者活動幅度較小,支架很難識別這種微小變化而無法進行跟隨,由于敏感性不夠,只能解決治療過程中粗略的靶點跟隨。 隨動支架的基礎定位方法還是前面提到的腦功能區或解剖學定位,無法從根本上滿足精準定位的需求,也無法保證二次定位的重復性,因此隨動支架并不能滿足TMS精準定位的需求,臨床上實用性不強,也沒有大力推廣。 基于TMS1.0時代的局限,我們迫切的需要一種更為成熟和先進的定位技術的出現—— 迎來TMS2.0時代! 代替人工的是機械,目前被稱為“機器人”,只要確定規則,機器就會精細化的執行命令,大大提高了定位的精準度和智能度,機器的精準關鍵因素在標定環節。在精準智能的TMS2.0時代,目前具有代表性的技術路線有兩種。 一是在TMS1.0時代光學導航產品的基礎上,增加智能機械臂,用機械臂代替人握持刺激線圈,可以實現治療過程中智能跟隨[8]。 但這種基于紅外光學引導的技術路線,由于首次定位仍需人工選擇,對操作者專業要求高;重建的3D頭模與現實腦的匹配都需要很繁瑣的操作流程,大大降低了工作效率,使其在臨床與科研方面使用嚴重受限。
圖2.1需要重新標定的紅外光學導航機器人 另一種是2019年武漢依瑞德聯合資聯虹康推出的阿米磁刺激智能機器人系統(后稱“阿米機器人”),這是一款全球首創的,基于機器視覺識別的TMS專用定位系統,完美且高效地實現了首次定位精準性、過程中智能跟隨和二次精準重復功能,完成了TMS定位史上一次質的飛躍,完全有潛力引領臨床和科研TMS應用從粗放定位的1.0時代跨入精準智能定位的2.0時代。
圖2.2 2019年依瑞德&資聯虹康企業管理集團推出的阿米機器人 - 高效 - 阿米機器人通過多維度機械臂握持刺激線圈和位置傳感器,省去了手持線圈定位的繁瑣,解放了操作者的雙手,全程智能化的快速識別和執行能力,大大提升了工作效率,為臨床和科研的同時應用創造了先天條件。 - 精準 - 阿米機器人可導入患者的MRI數據,系統自動建立患者的個體化3D頭模,通過機器視覺識別系統,將現實腦和3D頭模之間的進行快速智能匹配,精準且高效,將有顱骨和頭發覆蓋的大腦皮層“可視化”為個體的3D頭模,真正實現個體化、可視化操作,快速實現首次精準定位。 - 智能跟隨 - 機器人具有靶點記憶和靈敏的位置識別系統,可以快速識別患者頭部的位置變化,實現治療過程中的靶點跟隨保證不脫靶和二次精準重復,為精準智能化TMS的實現提供了可能,為科研成果的可信度和科學性提供了保障。
圖2.3 阿米機器人的臨床應用 阿米機器人超越紅外光學導航和第一種技術路線的突出表現有: ①阿米機器人可以實現預先設置刺激點,無需操作者手動探索選靶點,降低了操作者對解剖知識的要求和探索選點的操作誤差,而紅外光學導航和第一種技術路線都需要人工選點,增加了人工誤差。 ②阿米機器人可以快速智能地將現實腦與3D頭模之間進行匹配,高效且準確,而紅外光學導航和第一種技術路線都需要人工匹配,容易造成操作誤差。 ③阿米機器人每次使用都是通過機器視覺識別快速標定,高效省時而且準確,而紅外光學導航和第一種技術路線每次需要重新標定,操作繁瑣,且容易引入新的誤差。 ④阿米機器人可以實現治療中的靶點鎖定,實現智能跟隨,但紅外光學導航不能實現智能跟隨。 ⑤阿米機器人具有靶點記憶功能,可以快速精準實現二次重復定位,而紅外光學導航雖有靶點記憶,但需人工復位,很精準的參數需要人手復位,想想都很難做到。 總之,阿米機器人是充分整合個體的頭面部信息、大腦頭皮外形、患者個體化的MRI數據等三方面的定量信息,并結合刺激靶點與刺激線圈表面中心鎖定的距離和角度,可一鍵式快速(僅需10s)精準重復定位;治療過程中保證刺激線圈全程跟隨靶點,確保治療過程連續性,大大減少了操作的繁瑣和誤差,從理論和實踐證實,阿米機器人的誕生是TMS定位技術跨時代的飛躍。 在安全性方面,阿米機器人擁有多重安全防護措施,如急停按鈕,防碰撞檢測傳感器和智能算法,可確保治療過程安全,無隱患,是當前TMS臨床應用及科研必不可少的配套利器。 展望TMS 3.0時代! 我們看的更遠,是因為我們站在巨人的肩膀上!在TMS 2.0時代的基礎上,我們期待,未來的TMS通過掃描大腦即可發現病灶與功能障礙,同時智能匹配個體化的檢測指標,快速確定最優的個體化治療方案,以實現患者獲得更受益的TMS治療,讓患者踏上康復的快車道!
說點什么
發表
最新評論
|








點擊開啟品牌新篇章
愛用建站是智能網站SAAS平臺。通過集成前沿云計算技術和豐富優質電商應用,愛用建站為用戶一站式提供運營簡單、功能強大、自帶流量、靈活拓展的全網智能網站。任何人無需技術都可以輕松擁有。

網站支持
增值電信業務經營許可證編號:B2-20150988

